题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
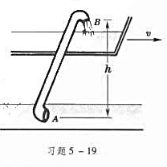
某反应式步进电机的结构如题图所示,其定子具有均匀分布的六个磁极,磁极上绕有绕组。两个相对的磁极组成一相。下列说法,哪些是正确的?()①单三拍工作方式时,其步距角为30°。②六拍工作方式时,其步距角为15°③双三拍工作方式时,其步距角为15°。④步进电机的转速决定于脉冲控制信号的频率。
某反应式步进电机的结构如题图所示,其定子具有均匀分布的六个磁极,磁极上绕有绕组。两个相对的磁极组成一相。下列说法,哪些是正确的?()①单三拍工作方式时,其步距角为30°。②六拍工作方式时,其步距角为15°③双三拍工作方式时,其步距角为15°。④步进电机的转速决定于脉冲控制信号的频率。
A.①、③、④
B.②、③、④
C.①、②、③、④
D.①、②、④
 答案
答案
查看答案


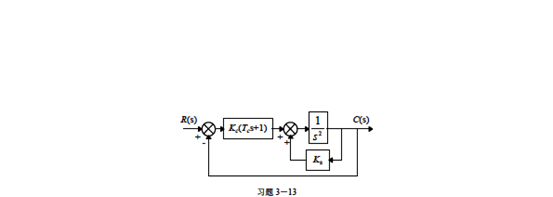
 的频示宽度增加一倍再作校正设计,试设计局部闭环结构。
的频示宽度增加一倍再作校正设计,试设计局部闭环结构。


 考虑图中结点λ之后增益为1的通路在本题中能否省去?
考虑图中结点λ之后增益为1的通路在本题中能否省去?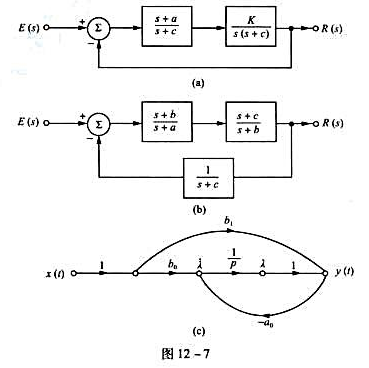
 根轨迹图如题图所示。
根轨迹图如题图所示。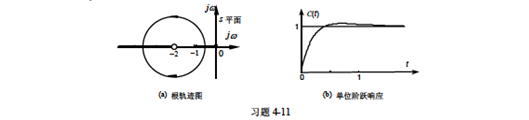
 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
 是
是