题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
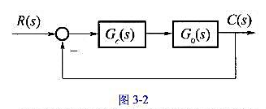
某系统结构如图所示,其中试设计校正环节Ct(s),使该系统在输入r(t)=t作用下的稳态误差为零。
某系统结构如图所示,其中
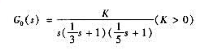
试设计校正环节Ct(s),使该系统在输入r(t)=t作用下的稳态误差为零。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
某系统结构如图所示,其中
试设计校正环节Ct(s),使该系统在输入r(t)=t作用下的稳态误差为零。
答案
 更多“某系统结构如图所示,其中试设计校正环节Ct(s),使该系统在输入r(t)=t作用下的稳态误差为零。”相关的问题
更多“某系统结构如图所示,其中试设计校正环节Ct(s),使该系统在输入r(t)=t作用下的稳态误差为零。”相关的问题
第1题
设某随动系统的结构阁如下,其中检测比较放大环节: ,功率放大环节:
,功率放大环节: ,执行电机(含减速器):
,执行电机(含减速器):
 。试用根轨迹法分析系统性能。若在系统中加入申联校正装置
。试用根轨迹法分析系统性能。若在系统中加入申联校正装置

试用根轨迹法分析系统的动态性能和稳态性能。

第3题
某单位负反馈非线性系统如图所示,非线性环节的描述函数为 ,线性部分的传递函数如图所示。试分析:
,线性部分的传递函数如图所示。试分析:
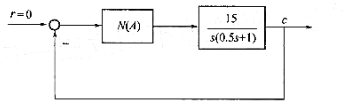
(1)系统是否存在自振。
(2)若产生自振,计算自振频率及振幅,并讨论极限环的稳定性。
第4题
某系统其结构图和开环幅相特性曲线如图2-5-20(a),(b)所示。图中
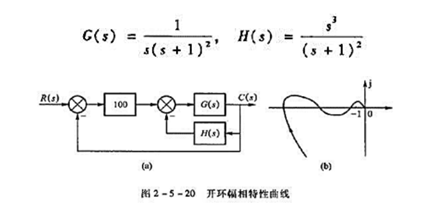
试判断闭环系统的稳定性,并确定闭环特征方程正实部根的个数。
第5题
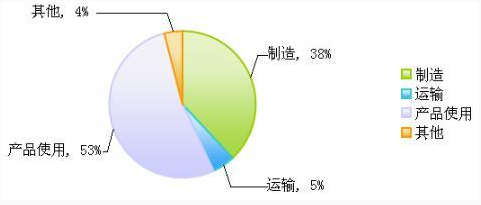
A.该产品温室气体排放量主要来自于制造与产品使用环节
B.温室气体排放与制造工艺有关
C.产品设计不需要考虑使用时的温室气体排放
D.更小、更轻的产品包装,有利于减少运输环节的温室气体排放
第7题
A.“超越摩尔”时代已经来临
B.传统摩尔定律或将面临颠覆
C.“超越摩尔”研发中试线改变生活
D.上海启动8英寸“超越摩尔”研发中试线
第10题
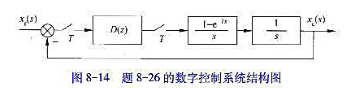
数字控制系统结构图如图8-14所示,采样周期T=1s。
(1)试求未校正系统的闭环极点,并判断其稳定性。
(2)xt(t)=t时,按最少拍设计,求D(z)表达式,并求X0(z)的级数展开式。
 的频示宽度增加一倍再作校正设计,试设计局部闭环结构。
的频示宽度增加一倍再作校正设计,试设计局部闭环结构。