题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
一般作为空行程运行,使刀具快速移动到所需位置是()。
A.返回参考点
B.快速点位点
C.程序延时
D.螺纹插补
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.返回参考点
B.快速点位点
C.程序延时
D.螺纹插补
答案
 更多“一般作为空行程运行,使刀具快速移动到所需位置是()。”相关的问题
更多“一般作为空行程运行,使刀具快速移动到所需位置是()。”相关的问题
第1题
A.刀具快速移动到X=55,Y=-20处
B.编程错误
C.刀具按进给速度移动到X=55,Y=-20处
D.刀具快速向X正方向移动55,Y负方向移动20
第2题
A.刀具快速移动到X=50,Y=-20处
B.编程错误
C.刀具按进给速度移动到X=50,Y=-20处
D.刀具快速向X正方向移动50,Y负方向移动20
第3题
A.刀具快速移动到X=70,Y=-30处
B.编程错误
C.刀具按进给速度移动到X=70,Y=-30处
D.刀具快速向X正方向移动70,Y负方向移动30
第7题
第8题
在Windows资源管理器中选定了文件或文件夹后,若要将它们移动到不同驱动器的文件夹中,操作为()。
A.按下Ctrl键拖动鼠标
B.按下Shift键拖动鼠标
C.直接拖动鼠标
D.按下Alt键拖动鼠标
第9题
A.泵压是克服井内循环系统中摩擦损失所需的压力
B.油管压力就是油气从井底流动到井口后的剩余压力
C.套管压力是油管与套管环形空间内,油和气在井口的压力
D.油管压力是油管与套管环形空间内,油和气在井口的压力
第10题
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
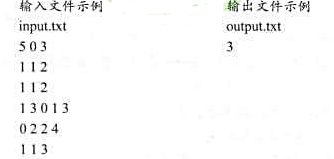
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
第11题
A.删除对象并重新上载,选择Glacier作为存储类
B.创建一个生命周期策略,在至少30天后将其迁移
C.直接在对象上更改存储类
D.以上都不是