题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
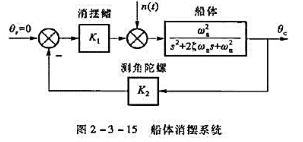
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
答案
 更多“设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果”相关的问题
更多“设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果”相关的问题
第1题
的稳态误差为enn=-0.099?
第2题
设复合控制系统的方框图如图6-25所示,其中前馈补偿装置的传递函数为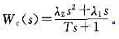 。式中,T为已知常数,
。式中,T为已知常数, 。试确定使系统等效为II型系统时的λ1和λ2的数值。
。试确定使系统等效为II型系统时的λ1和λ2的数值。
第3题
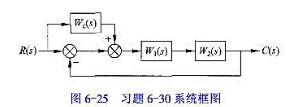
设电子心率起搏器系统如图3-53所示。
 其中,模仿心脏的传递函数相当于一纯积分器。试求: (1)若ζ=0.5对于最佳响应,问起搏器的增益K应为多大? (2)若期望心速为60次/min,并突然接通起搏器,问1s后实际心速为多少?瞬时最大心速为多大?
其中,模仿心脏的传递函数相当于一纯积分器。试求: (1)若ζ=0.5对于最佳响应,问起搏器的增益K应为多大? (2)若期望心速为60次/min,并突然接通起搏器,问1s后实际心速为多少?瞬时最大心速为多大?
第4题
设复合控制系统的方框图如图6-22所示,其中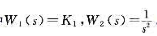 。试确定Wc(s)、W1(s)及K1使系统的输出完全不受扰动的影响,且单位阶跃响应的超调虽σ%=25%,调节时间tc=4s
。试确定Wc(s)、W1(s)及K1使系统的输出完全不受扰动的影响,且单位阶跃响应的超调虽σ%=25%,调节时间tc=4s
第5题
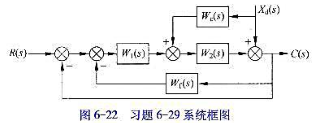
设电子心律起搏器系统如图2-3-8所示,其中模仿心脏的传递函数相当于一纯积分器。
①若ζ=0.5对应最佳响应,问起搏器增益K应取多少?
②若期望心速为60次/min ,并突然接通起搏器,问1min后实际心速为多少?瞬时最大心速为多少?
第6题
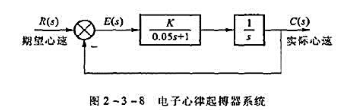
如图a所示,两复摆可分别绕水平轴O1和O2转动,两摆对此两轴的转动惯量各自为J1和J2,金将摆A自铅垂位置拉至某一角度然后释放,当撞及静止的摆B时的角速度为ω0;设恢复因数为e,转轴O1及O2至碰撞直线的距离相等,求碰撞后两摆的角速度。
第7题

的简谐振动.

第8题
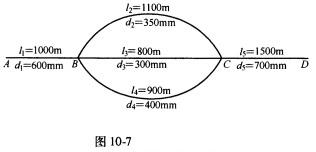
如图10-7所示管路,设其中的流量QV/A=0.6m3/s,λ=0.02,不计局部阻力,其他已知条件图中已标明,求A、D两点间的水头损失。
第10题
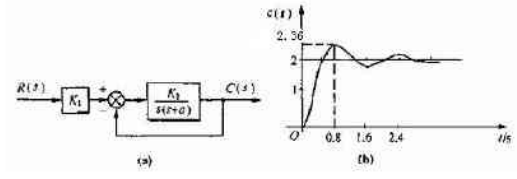
设图3-8(a)所示系统的单位阶跃响应如图3-8(b)所示,试确定系统参数K1,K2和a。