题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
在路径调板中可以将路径拖动到“创建新路径”按钮上复制路径。()
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“在路径调板中可以将路径拖动到“创建新路径”按钮上复制路径。( )”相关的问题
更多“在路径调板中可以将路径拖动到“创建新路径”按钮上复制路径。( )”相关的问题
第2题
A.在路径被选中的情况下,按Ctrl+Enter键
B.按Ctrl键单击路径调板上的路径缩览图
C.在路径被选中的情况下,按数字小键盘上的Enter键
D.将路径缩览图拖至用路径做为选区载入按钮上
第3题
A.双击图层可修改图层的名称
B.双击图层,可将背景图层转换为普通图层
C.选择移动工具,若当前图像中没有选区和路径,按Delete键可删除图层
D.将图层拖至“创建新图层”按钮上可复制图层
第4题
A.快速蒙板的作用主要是用来进行选区的修饰
B.图层蒙板和图层剪贴路径是不同类型的蒙板,它们之间是无法转换的
C.图层蒙板可转化为浮动的选择区域
D.当创建蒙板时,在通道调板中可看到临时的和蒙板相对应的Alpha通道
第6题
A.如果自动计算的路由与规划路径不同,可以通过设置”必经节点“或必不经节点”来进行路由约束
B.一条新路径的创建或搜索必须在其上一级服务层路径己存在的情况下才可能实现
C.选择“激活”复选框,路径创建成功之后会下发到网元层。否则,路径配置数据只会保存在网管侧
D.使用路径法创建Client业务路径,创建完后会自动生成光层OCh路径,减少路径创建的次数
第7题
A.从站点移动到集群
B.从集群移动到另一个集群
C.从站点移动到另一个站点
D.从集群移动到站点
第8题
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
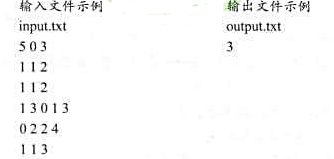
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
第10题
A.蝴蝶元件的中心没有吸附在引导线上
B.没有勾选“调整到路径”选项
C.引导层未创建补间动画
D.没有把蝴蝶元件分离