题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
用状态反馈进行系统极点配置可能会改变系统的可观测性()
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“用状态反馈进行系统极点配置可能会改变系统的可观测性()”相关的问题
更多“用状态反馈进行系统极点配置可能会改变系统的可观测性()”相关的问题
第2题
有系统:

(1) 画出模拟结构图。
(2) 若动态性能不满足要求,可否任意配置极点?
(3) 若指定极点为-3,-3,求状态反馈阵。
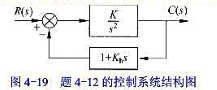
第6题
设系统结构图如图4-19所示。为使闭环极点位于

试确定增益K和反馈系数Kh的值,并以计算得到的K值为基准,绘出以Kh为变量的根轨迹。
第7题
(1)系统的特征方程为s3+4s2+s+4=0,由Routh判据判断系统的稳定性,并求出系统的闭环极点。
(2)系统的单位反馈二阶系统的开环传递函数为 为改善系统的性能加入测速反馈as,试求加入测速反馈后系统的无阻尼自然振荡频率,阻尼比和开环增益K,并说明测速反馈对系统性能有哪些影响。
为改善系统的性能加入测速反馈as,试求加入测速反馈后系统的无阻尼自然振荡频率,阻尼比和开环增益K,并说明测速反馈对系统性能有哪些影响。
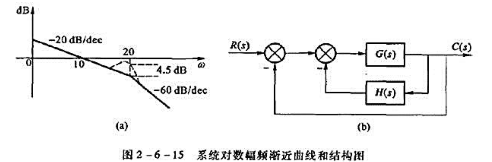
第8题
系统开环传递函数G(s)没有右半平面的零、极点,其对应的对数幅频渐近曲线如图2-6-15所示。若采用加内反馈校正的方法,消除开环幅频特性中的谐振峰,试确定校正装置的传递函数H(s)。
第9题
设系统状态方程为

试设计一状态观测器,使其极点为-r、-2r(r>0) ,并画出其结构图。
第10题
设单位反馈控制系统的开环传递函数为 根轨迹图如题图所示。
根轨迹图如题图所示。
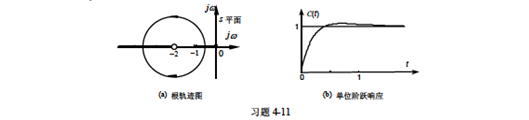
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。