题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设h是从A=< S,*,△,k>(到A'=< S',*',△,k’>的一个满同态,~是由h诱导的S上的等价关系
设h是从A=< S,*,△,k>(到A'=< S',*',△,k’>的一个满同态,~是由h诱导的S上的等价关系 证明A/~同构于A'。
证明A/~同构于A'。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
设h是从A=< S,*,△,k>(到A'=< S',*',△,k’>的一个满同态,~是由h诱导的S上的等价关系证明A/~同构于A'。
答案
 更多“设h是从A=< S,*,△,k>(到A'=< S',*',△,k’>的一个满同态,~是由h诱导的S上的等价关系”相关的问题
更多“设h是从A=< S,*,△,k>(到A'=< S',*',△,k’>的一个满同态,~是由h诱导的S上的等价关系”相关的问题
第1题
设h是从A=< S,*,k>到A'=< S',*',k'>的同态,证明如果< T,*',k'>是A'的子代数那么 是A的子代数。
是A的子代数。
第2题
设负反馈控制系统中
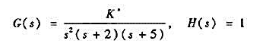
要求:
①概略绘制系统根轨迹图(0<K*<∞),并判断闭环系统的稳定性。
②如果改变反馈通道的传递函数,使H(s)=1+2s,重做第①小题,并讨论H(s)的变化对系统稳定性的影响。
第3题
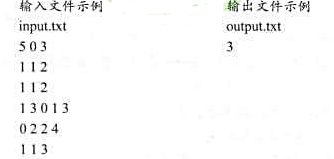
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
第4题
设 是两个布尔代数,并设f是从K到L的满同态,即对于任意的x.y∈K,有
是两个布尔代数,并设f是从K到L的满同态,即对于任意的x.y∈K,有 这里0k.0L和1k,1L分别是相应的布尔代数中的全上界和全下界。
这里0k.0L和1k,1L分别是相应的布尔代数中的全上界和全下界。
第6题
在373K下,反应:COCI2(g)===CO(g)+Cl2(g)的Kp=8×109,ΔSƟ373=125.5J/K。
计算:(1)373K,总压为202.6kPa时COCl2的解离度;
(2)373K下上述反应的ΔHƟ:
(3)总压为200kPa,COCl2的解离度为0.1%时的温度,设ΔCp=0。
第8题
 ,则可以用模拟归一化复频率s'与z的映射关系s'=f(z)直接得出要求的数字带通滤波器H(z).(1)证明:从模拟低通原型到数字带通滤波器,s'与z的映射关系为
,则可以用模拟归一化复频率s'与z的映射关系s'=f(z)直接得出要求的数字带通滤波器H(z).(1)证明:从模拟低通原型到数字带通滤波器,s'与z的映射关系为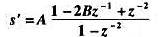
模拟低通原型归一化模拟角频率 与数字带通滤波器的数字角频率w间的关系为
与数字带通滤波器的数字角频率w间的关系为
并求常数A,B与数字带通指标间的关系.
(2)设计并实现数字巴特沃思型带通滤波器,给定技术指标为-3dB通带范围:0.3π≤w≤0.4π
阻带衰减:≤-15dB0≤w≤0.2π,0.5π≤w≤π
求该滤波器的系统函数H(z).并画出实现的结构框图.
第9题
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中加比例及微分串联校正和速度反馈两种不同方案,校正前后的具体结构参数如图2-4-23所示。
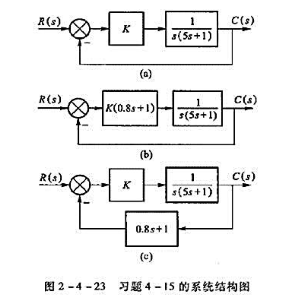
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。
第10题