题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
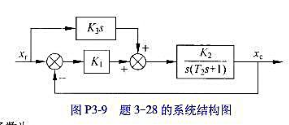
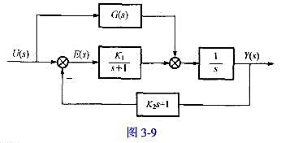
已知系统结构图如图3-9所示:(1)欲使系统闭环极点配置在-3+j4, -3-j4处,试求K1</sub>和K2</sub>的
已知系统结构图如图3-9所示:
(1)欲使系统闭环极点配置在-3+j4, -3-j4处,试求K1和K2的值;
(2)设计G(s),使阶跃作用u(t)下稳态误差为零。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
已知系统结构图如图3-9所示:
(1)欲使系统闭环极点配置在-3+j4, -3-j4处,试求K1和K2的值;
(2)设计G(s),使阶跃作用u(t)下稳态误差为零。
答案
 更多“已知系统结构图如图3-9所示:(1)欲使系统闭环极点配置在-3+j4, -3-j4处,试求K1和K2的”相关的问题
更多“已知系统结构图如图3-9所示:(1)欲使系统闭环极点配置在-3+j4, -3-j4处,试求K1和K2的”相关的问题
第1题
已知某控制系统的方框图如图6-21所示,欲使系统在反馈校正后满足如下要求:
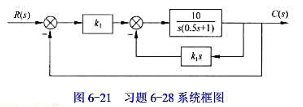
(1)速度稳态误差系数Kv≥5s-1;
(2)闭环系统阻尼比ξ=0.5;
(3)调节时间te(5%)≤2s。
试确定前置放大器增益k1及测速反馈系数kt(kt要求在0~1间选取)。
第3题
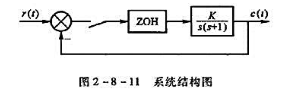
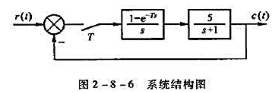
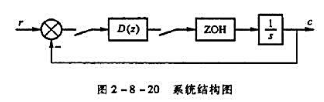
系统的结构图如图2-8-20所示,采样周期T=1s, 试设计控制器的脉冲传递函数D(z),使该系统在输入为单位阶跃信号时,输出满足以下条件:c(0)=0,c(k)=1,k>0,其中k为正整数。
第5题
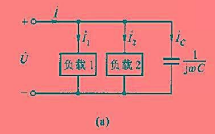
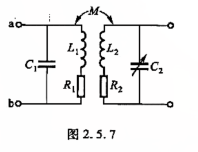
;负载2的视在功率为10kV·A,cosϕ2=0.8(超前);欲使Ù与Ì同相,电容值应为多少?
第6题
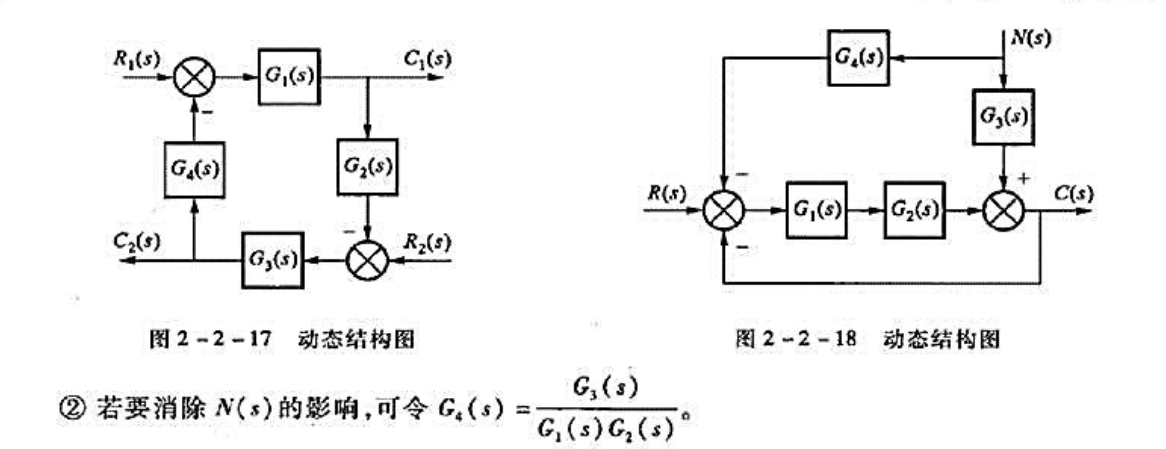
已知系统结构图如图2-2-17所示,求传递函数C1(s)/R1(s)、C2(s)/R2(s)、
C1(s)/R2(s)和C2(s)/R1(s)。
第7题
第8题
已知系统结构图如图2-2-18所示。
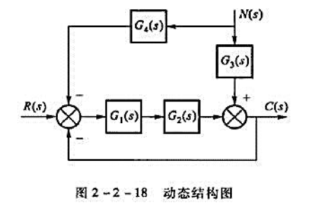
①求传递函数C(s)/R(s) ,C(s)/N(s)。
②若要消除N(s)的影响,C4(s) =?
第9题
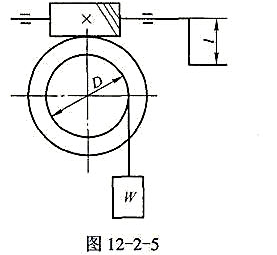
问:(1)欲使重物W上升1m,蜗杆应转多少转?(2)蜗杆与蜗轮间的当量摩擦系数f´=0.18,该机构能否自锁?(3)若重物W=5kN,手摇时施加的力F=100N,手柄转臂的长度1应是多少?
第10题
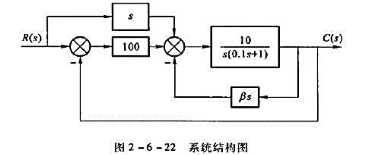
系统结构图如图2-6-22所示。选取β值使C(s)/R(s)为一阶无差度系统,并求这时阶跃响应的调节时间和系统在r(t)=t作用下的稳态误差。
第11题
一复合控制系统的结构图如图P3-9所示,其中 。试求:
。试求:
(1)输入量分别为 时系统的稳态误差;
时系统的稳态误差;
(2)系统的单位阶跃响应及其σ%,tt